Dynamic modeling is an important step in the development and the control
of a dynamic system. In fact, the model allows analyzing the system, its
possibilities and its behavior depending on various conditions. In the case
of aerial robots where the risk of damage is very high, this is especially
important in order to simulate and tune a controller before implementing it
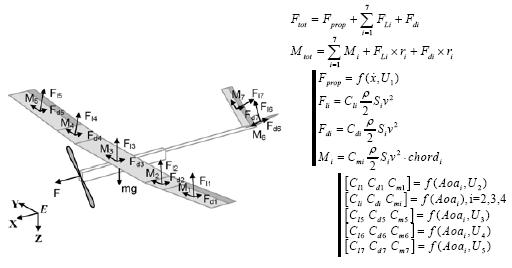
on the real machine. Hence, a dynamic model of Sky-Sailor was developed
using Lagrange-Euler formalism.
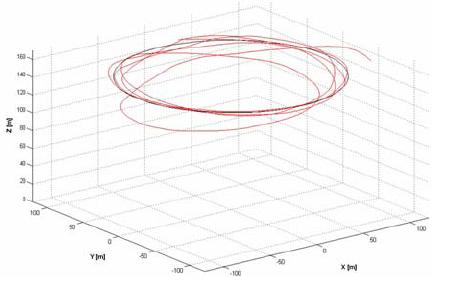
The controller is constituted by two different parts, an inner loop which role is to keep the stability of the system and an outer loop used to plan and follow the trajectory. For the low level, an optimal linear state feedback control method, more in particular a Linear Quadratic Regulator is used. It is based on the dynamic model explained above. For the high level part, the choice was to adapt an algorithm proposed and tested for the path tracking of a non-holonomous robot. After simulation with the airplane dynamic model, the final controller shows to be very robust in various conditions. Figure below shows for example the trajectory of the airplane, flying at 8.2 m/s with wind turbulences of 2 m/s.
The work on the model, controller and navigation is a collaboration with the Automatic Control Laboratory, more especially Sebastien Gros, Davide Buccieri and Philippe Mullhaupt, and Andrea Mattio who achieved his Master project on this subject [see publications]